What happens to a system when we perturb it slightly away from its stable equilibrium?
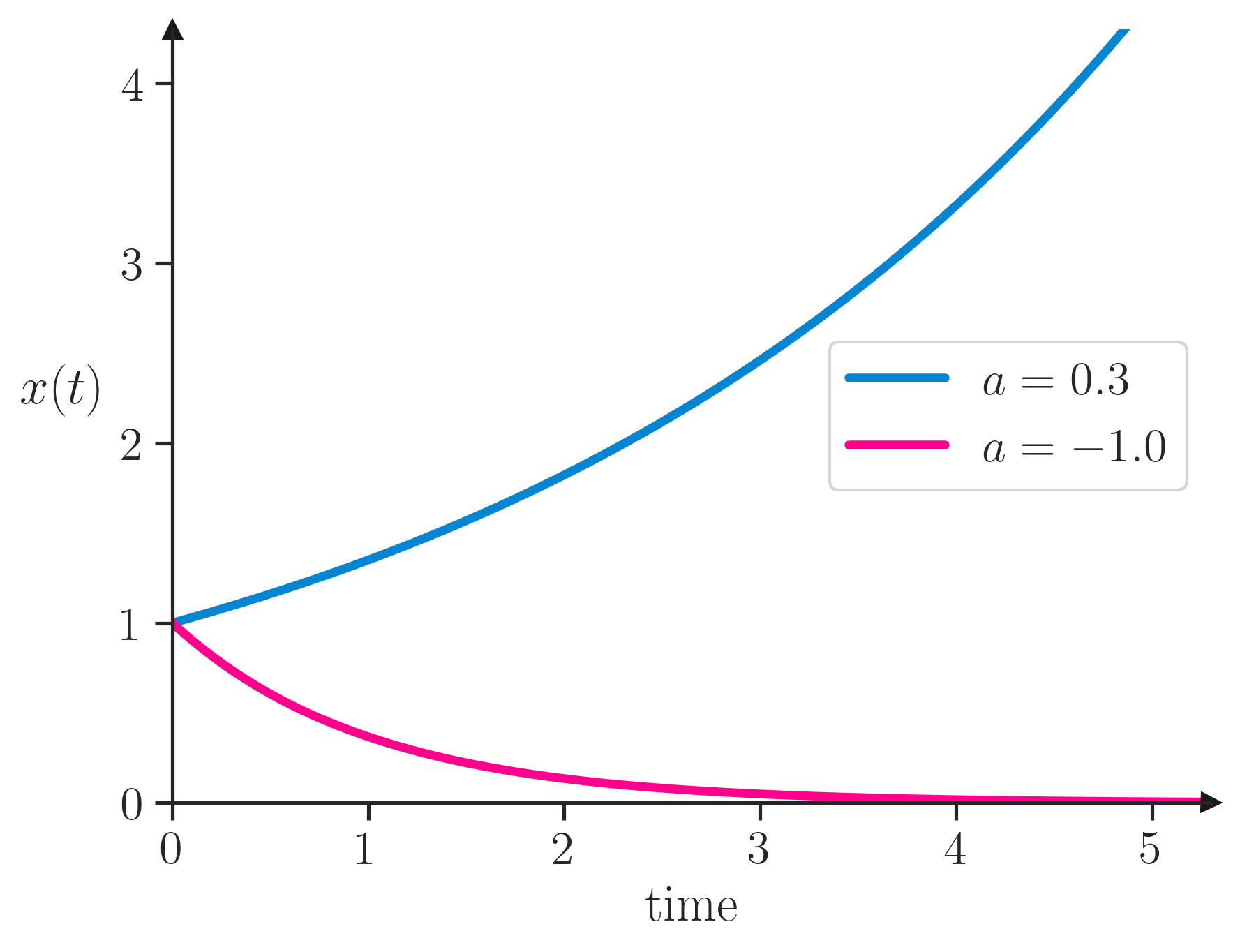
a 1d linear dynamical system
\[
\frac{dx}{dt} = ax.
\]
\(x=0\) is a steady state solution. If we start away from it at \(x_0\), the solution can be obtained by integrating the equation above:
\[
x(t) = x_0 \,e^{at}
\]
import stuff
import numpy as npimport pandas as pdimport matplotlib.pyplot as pltimport matplotlibimport matplotlib.gridspec as gridspecfrom scipy.integrate import solve_ivpimport seaborn as snssns.set_theme(style="ticks", font_scale=1.5) # white graphs, with large and legible letters# %matplotlib widget
\[
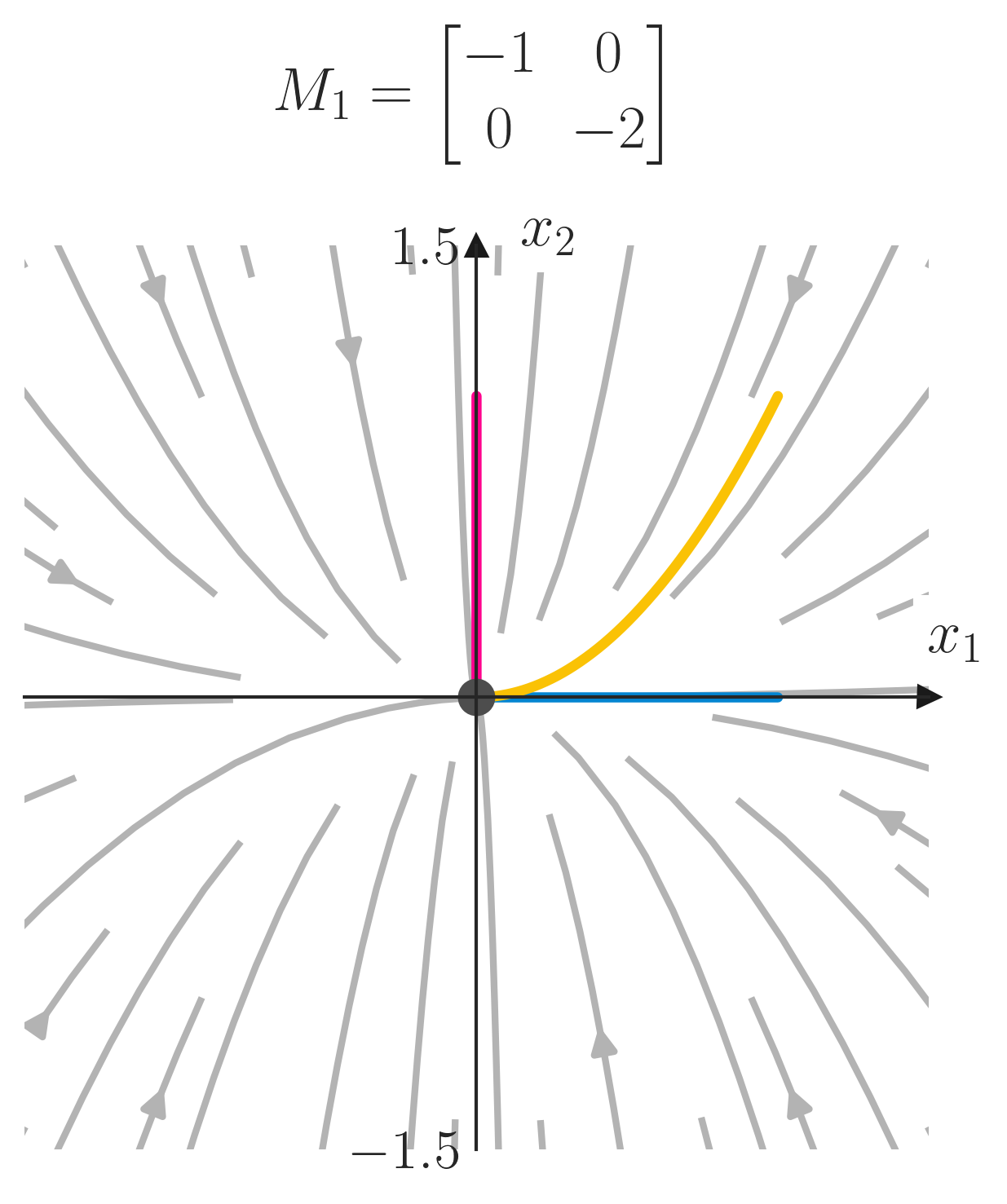
\frac{d\mathbf{x}}{dt} = M \mathbf{x},
\] where \(\mathbf{x}=(x_1,x_2)\) and \(M = \begin{pmatrix} a & b \\ c & d \end{pmatrix}\).
The steady state solution is \(\mathbf{x}=(0,0)\). Let’s see the flow in this 2d space.
system of equations
def system_equations_2d(p, x, y):return [p['a'] * x + p['b'] * y, p['c'] * x + p['d'] * y, ]# parameters as a dictionaryA0 = {'a': -1.0, 'b': +0.0,'c': +0.0, 'd': -2.0}A1 = {'a': -1.0, 'b': +1.0,'c': +0.0, 'd': -2.0}A2 = {'a': -1.0, 'b': +10,'c': +0.0, 'd': -2.0}
prepare streamplot and trajectories
min_x, max_x = [-3, 3]min_y, max_y = [-3, 3]div =50X, Y = np.meshgrid(np.linspace(min_x, max_x, div), np.linspace(min_y, max_y, div))# given initial conditions (x0,y0), simulate the trajectory of the system as ivpdef simulate_trajectory(p, x0, y0, tmax=10, dt=0.01): t_eval = np.arange(0, tmax, dt) sol = solve_ivp(lambda t, y: system_equations_2d(p, y[0], y[1]), [0, tmax], [x0, y0], t_eval=t_eval)return solt0a = simulate_trajectory(A0, 0, 1, 100)t0b = simulate_trajectory(A0, 1, 0, 100)t0c = simulate_trajectory(A0, 1, 1, 100)t1 = simulate_trajectory(A1, 0, 1, 100)t2 = simulate_trajectory(A2, 0, 1, 100)
now let’s plot
fig, ax = plt.subplots()density =2* [1.0]minlength =0.05arrow_color =3* [0.7]bright_color1 ="xkcd:hot pink"bright_color2 ="xkcd:cerulean"bright_color3 ="xkcd:goldenrod"# make sure that each axes is squareax.set_aspect('equal', 'box')ax.streamplot(X, Y, system_equations_2d(A0, X, Y)[0], system_equations_2d(A0, X, Y)[1], density=density, color=arrow_color, arrowsize=1.5, linewidth=2, minlength=minlength, zorder=-10 )ax.plot(t0a.y[0], t0a.y[1], color=bright_color1, lw=3)ax.plot(t0b.y[0], t0b.y[1], color=bright_color2, lw=3)ax.plot(t0c.y[0], t0c.y[1], color=bright_color3, lw=3)ax.plot(t1.y[0][-1], t1.y[1][-1], 'o', color=3*[0.3], markersize=10)# make spines at the origin, put arrow at the end of the axisax_list = [ax]for axx in ax_list: axx.spines['left'].set_position('zero') axx.spines['bottom'].set_position('zero') axx.spines['right'].set_color('none') axx.spines['top'].set_color('none') axx.spines['left'].set_linewidth(1.0) axx.spines['bottom'].set_linewidth(1.0) axx.xaxis.set_ticks_position('bottom') axx.yaxis.set_ticks_position('left') axx.xaxis.set_tick_params(width=0.5) axx.yaxis.set_tick_params(width=0.5)# put arrow at the end of the axis axx.plot(1, 0, ">k", transform=axx.get_yaxis_transform(), clip_on=False) axx.plot(0, 1, "^k", transform=axx.get_xaxis_transform(), clip_on=False) axx.text(1, 0.55, r"$x_1$", transform=axx.transAxes, clip_on=False, bbox=dict(facecolor='white', edgecolor='white')) axx.text(0.55, 1, r"$x_2$", transform=axx.transAxes, clip_on=False, bbox=dict(facecolor='white', edgecolor='white'))# set limits axx.set(xticks=[-3,3], yticks=[-1.5,1.5], xlim=[-1.5, 1.5], ylim=[-1.5, 1.5],)# remove ticks from both axes axx.tick_params(axis='both', which='both', length=0)# put on title the respective parameters as matrix, use latex equation# add pad to title to avoid overlap with x-axisax.set_title(r'$M_1=\begin{bmatrix} -1 & 0 \\ 0 & -2 \end{bmatrix}$', pad=40)plt.savefig("2d_system_0.png")
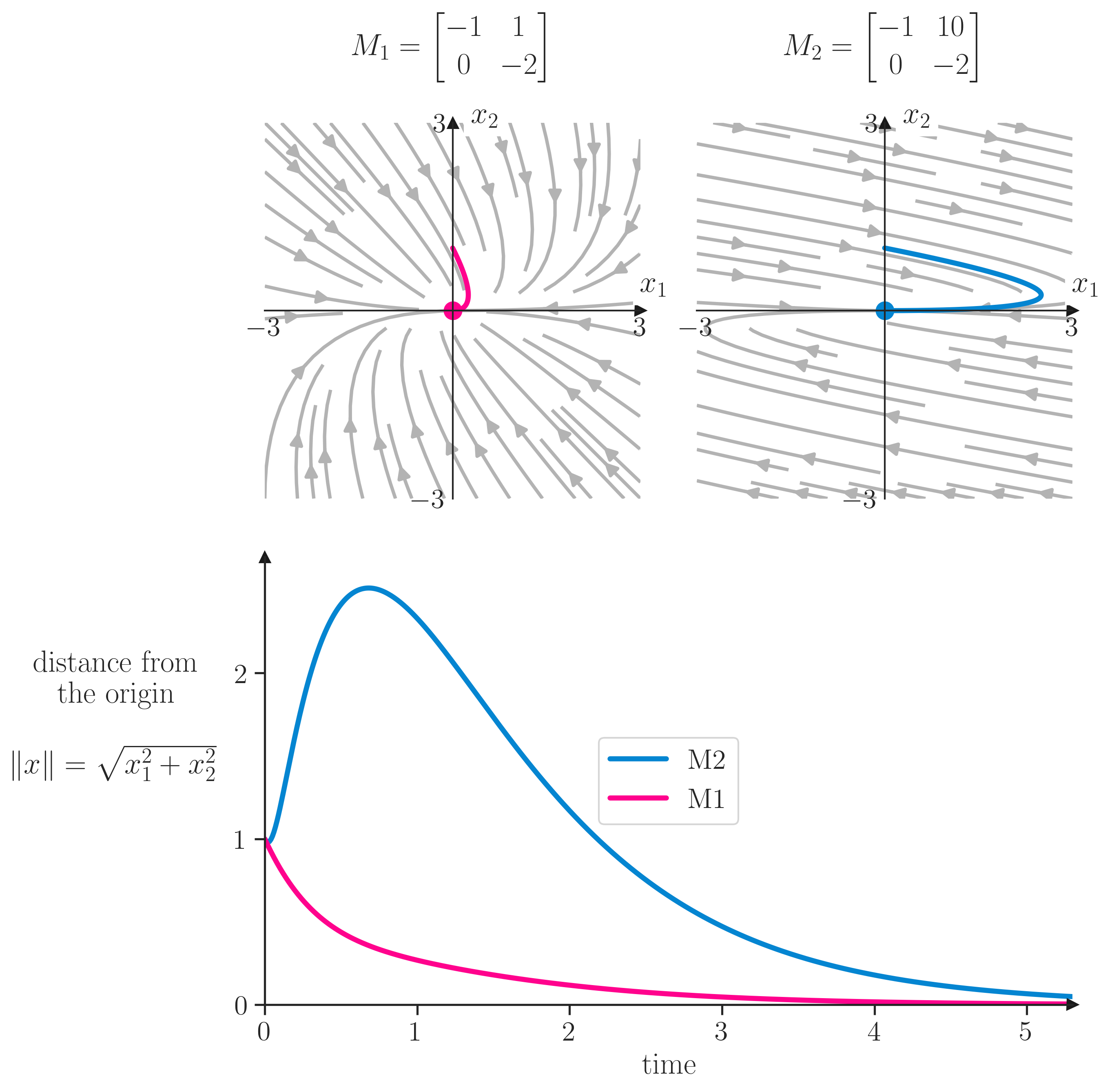
The solution \(\mathbf{x}=(0,0)\) is stable because both eigenvalues of \(M\) are negative. What happens when we change the matrix slightly, but still keeping the eigenvalues exactly the same as before?
now let’s plot
# learn how to configure:# http://matplotlib.sourceforge.net/users/customizing.htmlparams = {'font.family': 'serif','ps.usedistiller': 'xpdf','text.usetex': True,# include here any neede package for latex'text.latex.preamble': r'\usepackage{amsmath}', }plt.rcParams.update(params)# matplotlib.rcParams['text.latex.preamble'] = [# r'\usepackage{amsmath}',# r'\usepackage{mathtools}']fig = plt.figure(figsize=(10, 10))gs = gridspec.GridSpec(2, 2, width_ratios=[1,1], height_ratios=[1,1])gs.update(left=0.20, right=0.86,top=0.88, bottom=0.13, hspace=0.05, wspace=0.15)ax0 = plt.subplot(gs[0, 0])ax1 = plt.subplot(gs[0, 1])ax2 = plt.subplot(gs[1, :])density =2* [0.80]minlength =0.2arrow_color =3* [0.7]bright_color1 ="xkcd:hot pink"bright_color2 ="xkcd:cerulean"# make sure that each axes is squareax0.set_aspect('equal', 'box')ax1.set_aspect('equal', 'box')ax0.streamplot(X, Y, system_equations_2d(A1, X, Y)[0], system_equations_2d(A1, X, Y)[1], density=density, color=arrow_color, arrowsize=1.5, linewidth=2, minlength=minlength, zorder=-10 )ax1.streamplot(X, Y, system_equations_2d(A2, X, Y)[0], system_equations_2d(A2, X, Y)[1], density=density, color=arrow_color, arrowsize=1.5, linewidth=2, minlength=minlength, zorder=-10 )ax0.plot(t1.y[0], t1.y[1], color=bright_color1, lw=3)ax1.plot(t2.y[0], t2.y[1], color=bright_color2, lw=3)ax0.plot(t1.y[0][-1], t1.y[1][-1], 'o', color=bright_color1, markersize=10)ax1.plot(t2.y[0][-1], t2.y[1][-1], 'o', color=bright_color2, markersize=10)# make spines at the origin, put arrow at the end of the axisax_list = [ax0, ax1]for axx in ax_list: axx.spines['left'].set_position('zero') axx.spines['bottom'].set_position('zero') axx.spines['right'].set_color('none') axx.spines['top'].set_color('none') axx.spines['left'].set_linewidth(1.0) axx.spines['bottom'].set_linewidth(1.0) axx.xaxis.set_ticks_position('bottom') axx.yaxis.set_ticks_position('left') axx.xaxis.set_tick_params(width=0.5) axx.yaxis.set_tick_params(width=0.5)# put arrow at the end of the axis axx.plot(1, 0, ">k", transform=axx.get_yaxis_transform(), clip_on=False) axx.plot(0, 1, "^k", transform=axx.get_xaxis_transform(), clip_on=False) axx.text(1, 0.55, r"$x_1$", transform=axx.transAxes, clip_on=False, bbox=dict(facecolor='white', edgecolor='white')) axx.text(0.55, 1, r"$x_2$", transform=axx.transAxes, clip_on=False, bbox=dict(facecolor='white', edgecolor='white'))# set limits axx.set(xticks=[-3,3], yticks=[-3,3], xlim=[-3, 3], ylim=[-3, 3],)# remove ticks from both axes axx.tick_params(axis='both', which='both', length=0)# put on title the respective parameters as matrix, use latex equation# add pad to title to avoid overlap with x-axisax0.set_title(r'$M_1=\begin{bmatrix} -1 & 1 \\ 0 & -2 \end{bmatrix}$', pad=40)ax1.set_title(r'$M_2=\begin{bmatrix} -1 & 10 \\ 0 & -2 \end{bmatrix}$', pad=40)L2_one = np.sqrt(t1.y[0]**2+ t1.y[1]**2)L2_two = np.sqrt(t2.y[0]**2+ t2.y[1]**2)# bottom plotax2.plot(t2.t, L2_two, color=bright_color2, lw=3, label='M2')ax2.plot(t1.t, L2_one, color=bright_color1, lw=3, label='M1')ax2.legend(loc='center')ax2.set(xlim=[0,5.3], ylim=[0,2.7], yticks=[0,1,2], xlabel='time',)ax2.set_ylabel('distance from\nthe origin\n\n'+r"$\lVert x\rVert =\sqrt{x_1^2+x_2^2}$", labelpad=70, rotation=0)# only left and bottom spinesax2.spines['right'].set_color('none')ax2.spines['top'].set_color('none')ax2.plot(1, 0, ">k", transform=ax2.get_yaxis_transform(), clip_on=False)ax2.plot(0, 1, "^k", transform=ax2.get_xaxis_transform(), clip_on=False)
resilience
Resilience is defined as the minimal return rate to steady state:
\[
R = -\text{Re}(\lambda_1(M)),
\]
where \(\lambda_1(M)\) is the eigenvalue with the largest real part.
mathematical interlude: how to solve the system of equations
The solution of the system of equation goes as follows:
Now we need to compute the matrix exponential \(e^{Mt}\). If \(M\) is diagonalizable, then \(M = PDP^{-1}\), where \(D\) is a diagonal matrix with the eigenvalues of \(M\) on the diagonal and \(P\) is the matrix whose columns are the eigenvectors of \(M\):
The question arises whether asymptotic behavior adequately characterizes the response to perturbations. Because of the short duration of many ecological experiments, transients may dominate the observed responses to perturbations. In addition, transient responses may be at least as important as asymptotic responses. Managers charged with ecosystem restoration, for example, are likely to be interested in both the short-term and long-term effects of their manipulations, particularly if the short-term effects can be large.
The reactivity is defined as the (normalized) maximum rate of change of the norm of the state vector \(\mathbf{x}\), for all nonzero initial conditions:
is called the Hermitian (symmetric) part of \(A\).
The reactivity is then \[
\sigma = \max_{\mathbf{x_0}\neq0} \left[ \frac{\mathbf{x}^T H(A) \mathbf{x}}{\lVert\mathbf{x}\rVert^2} \right]_{t=0}
\]
\[
\sigma = \lambda_{\text{max}}(H(A))
\]
In simple words, the reactivity is the maximum eigenvalue of the Hermitian (symmetric) part of the matrix \(A\). Differently from the resilience, the reactivity is always real, because the Hermitian part of a matrix always has real eigenvalues.
If \(\sigma > 0\) then at least one perturbation from the steady state \((\mathbf{x_0}\neq0)\) will grow before it returns to the steady state. If \(\sigma < 0\) then all perturbations \((\mathbf{x_0})\) will decay to the steady state without growing initially.
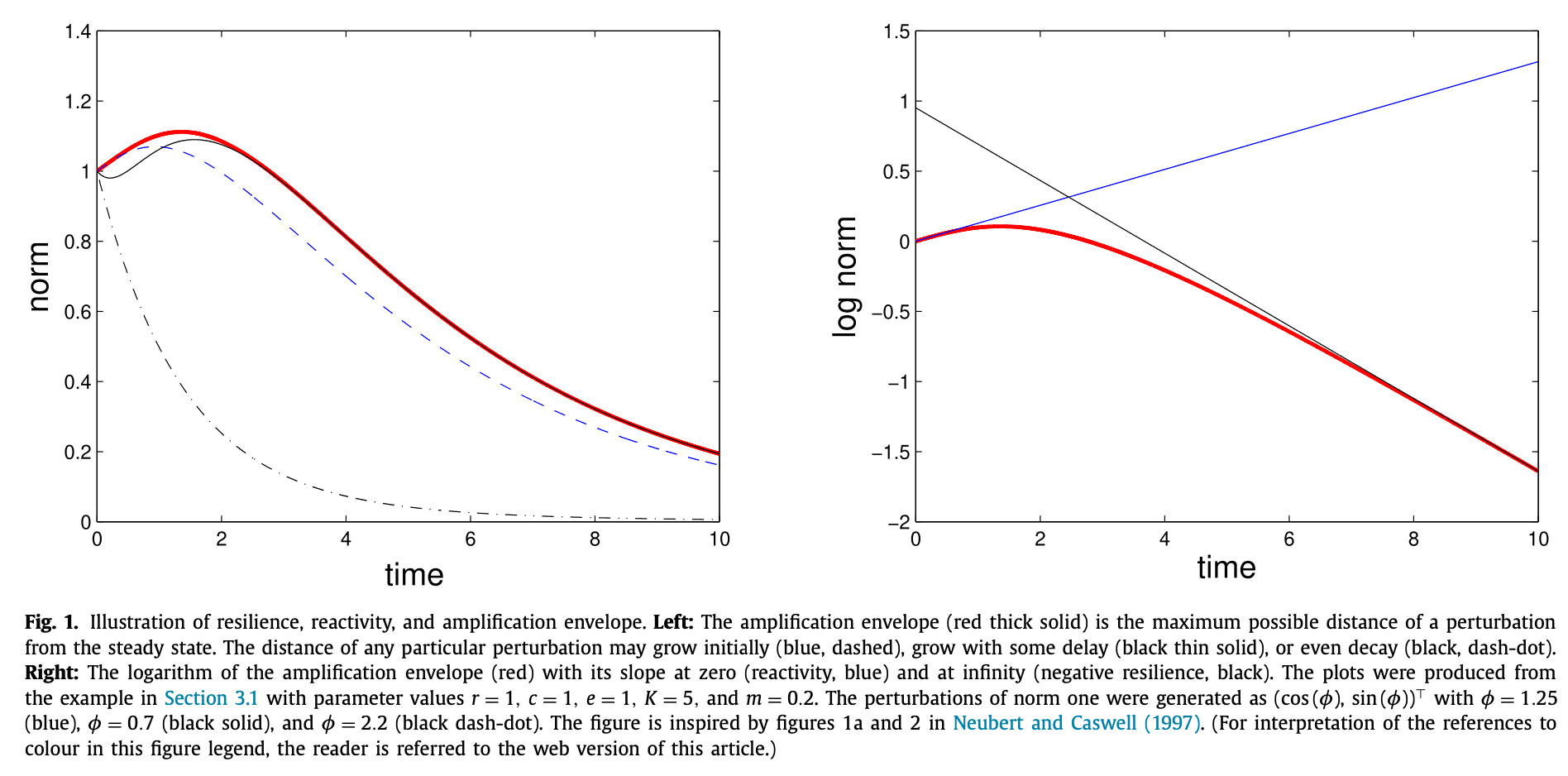
This measures, for any time \(t > 0\), the maximal deviation of any perturbation from the steady state.
Source: Lutscher (2020)
In general, there is not one initial perturbation that follows the amplification envelope all the time. Rather, for different \(t\), different initial perturbations produce the maximum deviation.
From the amplification envelope one can calculate the reactivity and resilience as the slope of \(\ln(\rho(t))\) in the limits as \(t \rightarrow 0\) and \(t \rightarrow \infty\):
\[
R = \frac{d}{dt}\ln\left[\rho(t)\right]\Bigg|_{t=\infty}
\]
problem: scaling
The definition of reactivity depends on the norm chosen, whereas resilience and stability do not. In particular, reactivity may depend on scaling.
Solution?
Mari, L., Casagrandi, R., Rinaldo, A., & Gatto, M. (2017). A generalized definition of reactivity for ecological systems and the problem of transient species dynamics. Methods in Ecology and Evolution, 8(11), 1574-1584.
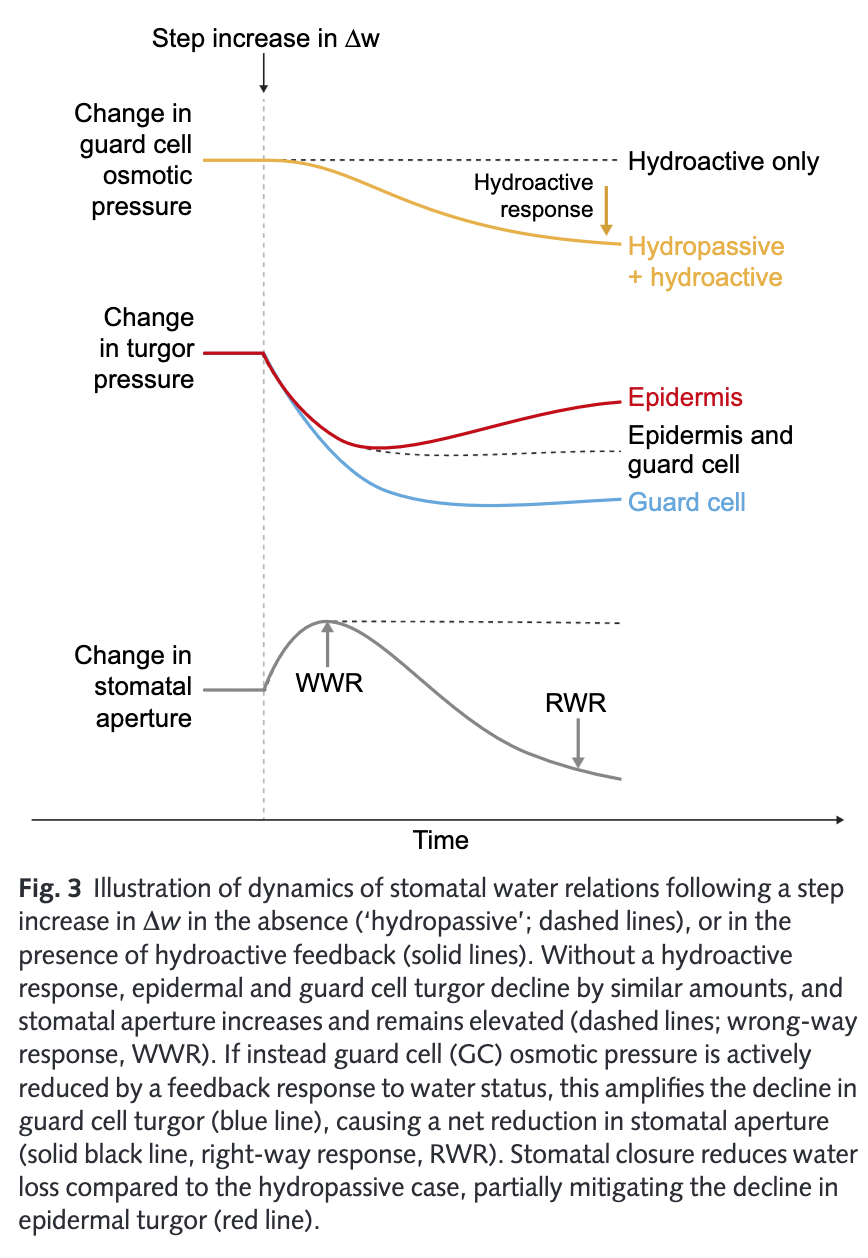
wrong-way response
Source: Buckley, T. N. (2019). How do stomata respond to water status?. New Phytologist, 224(1), 21-36.
Sources
Lutscher, F., & Wang, X. (2020). Reactivity of communities at equilibrium and periodic orbits. Journal of Theoretical Biology, 493, 110240.
Mari, L., Casagrandi, R., Rinaldo, A., & Gatto, M. (2017). A generalized definition of reactivity for ecological systems and the problem of transient species dynamics. Methods in Ecology and Evolution, 8(11), 1574-1584.
McCoy, J. H. (2013). Amplification without instability: applying fluid dynamical insights in chemistry and biology. New Journal of Physics, 15(11), 113036.
Neubert, M. G., & Caswell, H. (1997). Alternatives to resilience for measuring the responses of ecological systems to perturbations. Ecology, 78(3), 653-665.
Verdy, A., & Caswell, H. (2008). Sensitivity analysis of reactive ecological dynamics. Bulletin of Mathematical Biology, 70, 1634-1659.
Vesipa, R., & Ridolfi, L. (2017). Impact of seasonal forcing on reactive ecological systems. Journal of Theoretical Biology, 419, 23-35.
 Source: Lutscher (2020)
Source: Lutscher (2020)